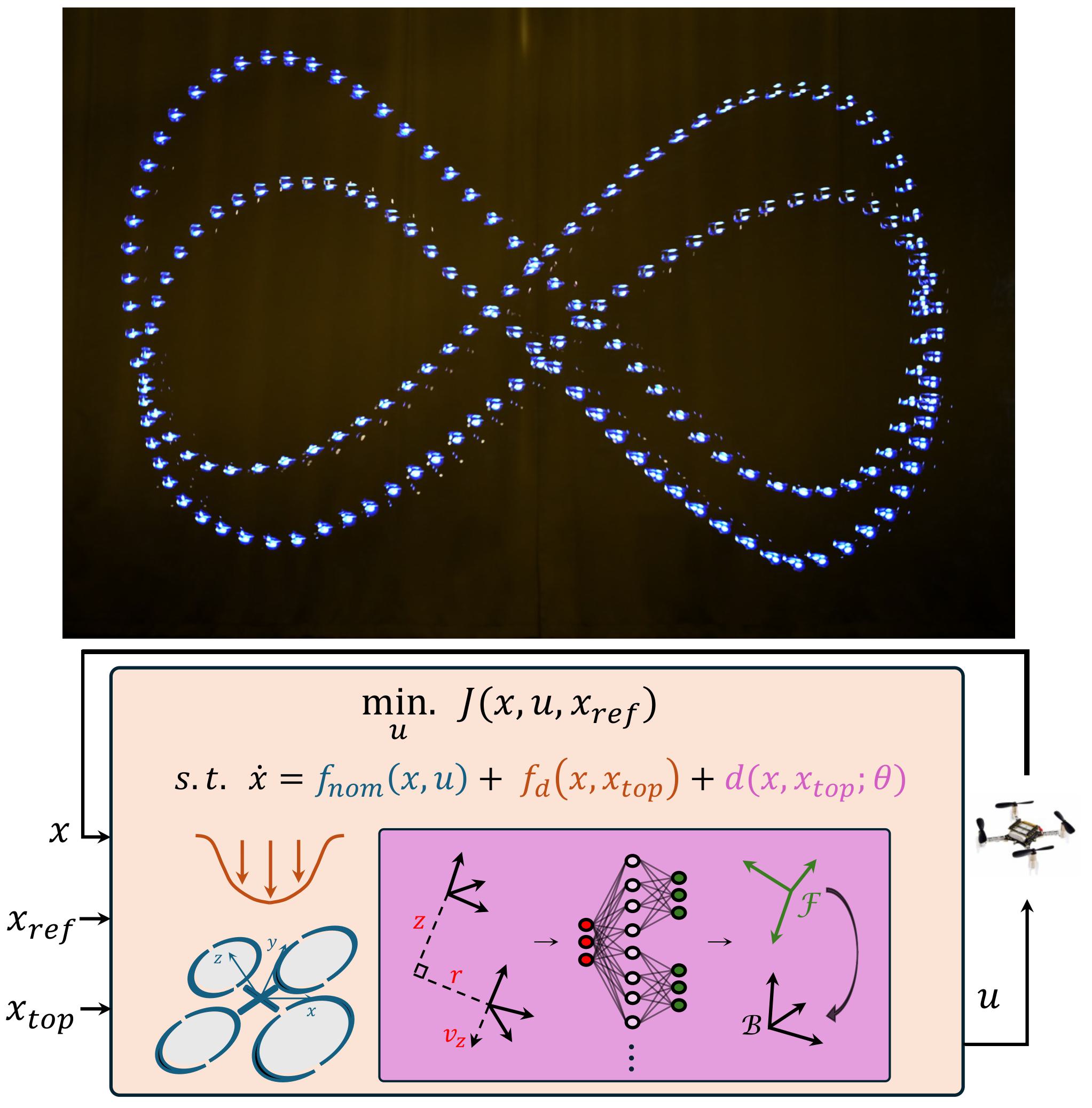
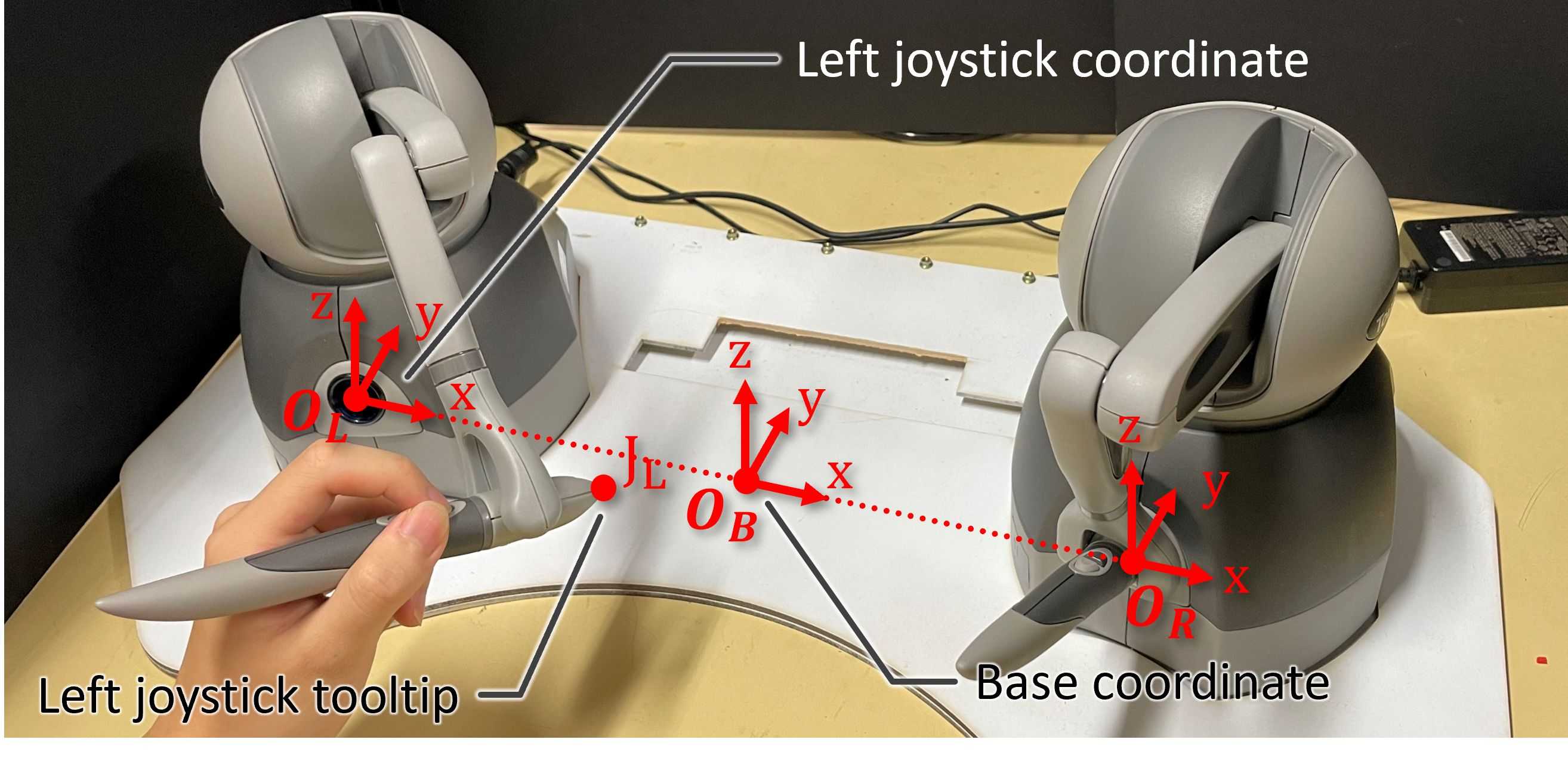
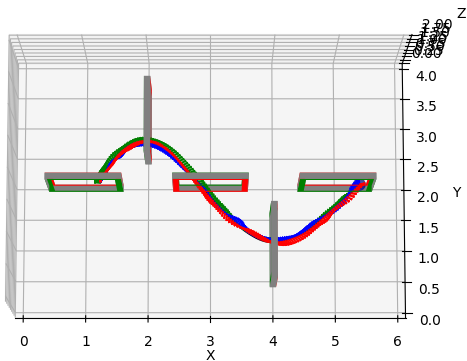
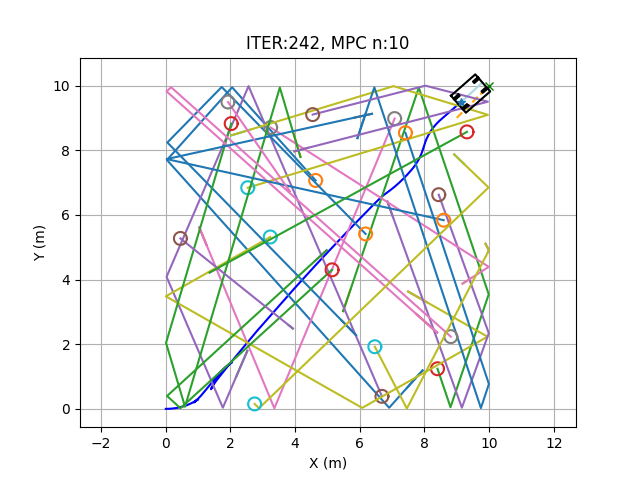
Research Projects KNODE-DW MPC Flying Quadrotors in Tight Formations using Learning-based Model Predictive Control iCROSS Design and Evaluation of the infant Cardiac Robotic Surgical System (iCROSS) Qt-Ethercat Software System A Qt UI for controlling devices through Ethercat Operating Joysticks using Unity Obtaining sensor readings and rendering forces from the Touch joysticks Course Projects Reinforcement Learning for Autonomous Drone Racing Course project of ESE 6500: Learning in Robotics, Penn Obstacle Avoidance using MPC Course project of MEAM 5170: Control and Optimization with Applications in Robotics, Penn Multi-Directional Drawing Course project of Robotics, NTU