Operating Joysticks using Unity
Obtaining sensor readings and rendering forces from the Touch joysticks
This individual research project is the foundation for joystick teleoperation in the iCROSS project. This project’s challenge was understanding and modifying the Unity sample code provided by 3D systems with nearly no documentation. The major steps included matching the built-in sensor readings to the physical world, transforming the coordinates, and calculating force feedback using the artificial potential method.
If you are interested in the code, here is the Github repo: Repo
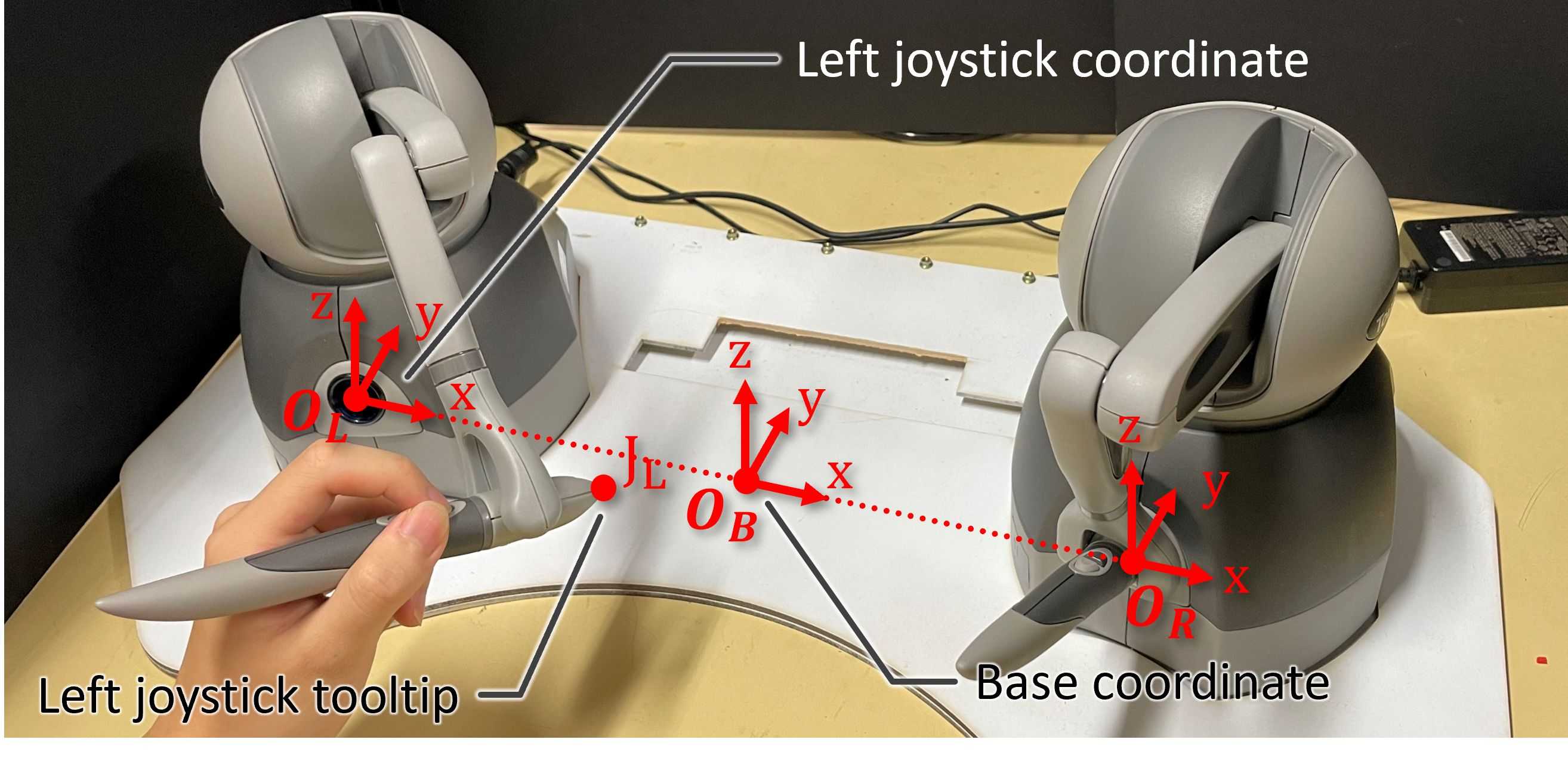
The Touch joysticks from 3D systems.